Study for Optimization of Battery Consumption for Unmanned Aerial Vehicles
Abstract
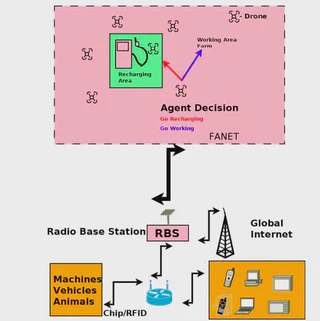
Unmanned aerial vehicles, also called drones, can be used in critical applications, such as disaster recovery support or precision agriculture. However, their autonomy is limited due to their small size and capacity. New forms of energy can increase the autonomy of drones and improve the coordination of their processes, both work and decision-making for recharging their energy sources. This work aims to develop coordination proposals for the recharging process of these devices, aiming to increase their autonomy. In this research, drones are considered Internet of Things devices, operating together as a swarm. Drones must decide whether to recharge their batteries at a recharging station. This work presents two main results: first, it identifies three gaps in the literature from a systematic review on coordinating drone recharging in the context of applications in agriculture and disasters. The second result was developing and documenting an agent-based simulation (ABM) model in NetLogo software, in which 12,000 simulation runs were performed. In this model, a swarm of drones is considered to be acting autonomously and without communication with each other when deciding whether to recharge. For this model, two decision-making policies were proposed, called Baseline and a game theory-based ChargerThreshold policy, which were developed and tested, in addition to three indicators to evaluate robustness and efficiency in different situations. The literature review showed few practical studies in the context of recharging drone swarms. The development of a simulation base, such as this work, and the creation of performance indicators to evaluate simulation scenarios are important contributions to this research area, as they serve as a basis for future developments. The results highlighted three gap types in the literature and showed that both policies work well in situations with lower energy demand. However, in simulation scenarios with higher battery consumption rates, the game theory-based policy proved to be more efficient, allowing the drones to perform the expected work autonomously. The simulation results highlight the potential of the proposed decision-making strategies to optimize drone coordination in real-world scenarios, showing the potential for using this approach in other applications, such as the electric vehicle recharging process.
Type
Publication
Ph.D. Thesis, Universidade Estadual de Campinas (UNICAMP)

Authors
Dr. Leonardo Grando
(he/him)
Professor & Researcher
Dr. Leonardo Grando is a researcher focused on Complex Systems, Artificial Intelligence, and Agent-Based Simulation (NetLogo).
He holds a Ph.D. in Technology from UNICAMP and works as an Assistant Professor at UNASP, pushing the boundaries of Educational Technology and IoT.